- Home
- Expertise
-
Laboratories
-
Projects
Scalable Mobile Underwater Sonar Technology The project aims at developing a system of cooperative Autonomous Underwater Vehicles (AUVs) for geotechnical surveying and geophysical exploration Autonomous, actively guided magnetic field probe for ordnance detection Unexploded ordnance from two World Wars and other military activities can be found in almost all German waters Underwater acoustic system The project will address underwater communication, acoustic distributed sensor array, mission planning and robot navigation, guidance and control issues
- About
- Contact




Choose your language
English
KNOWLEDGE IS POWER
Below is a selection of projects to which TUMIKI has made a valuable contribution. With the filter in the right bar you can choose specific categories.

UARP - UNDERWATER ACOUSTIC SIGNAL ACQUISITION SENSOR ARRAY
View project
TM06SW - UNDERWATER ACOUSTIC RECORD AND ANALYSIS SOFTWARE
View project
TM06TR - UNDERWATER TRANSCEIVER SYSTEM
View project
ASCS - ACTIVE SONAR TRAINING SYSTEM
View project
Underwater acoustic system
View project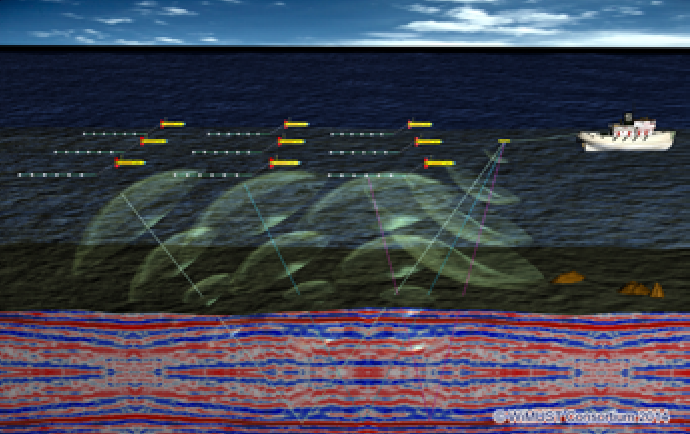
Scalable Mobile Underwater Sonar Technology
View project
Autonomous, actively guided magnetic field probe for ordnance detection
View projectAGD - an autonomous, actively guided magnetic field probe for ordnance detection
Unexploded ordnance from two World Wars and other military activities can be found in almost all German waters. In the North and Baltic Seas alone, over 1.6 million tonnes are a growing problem due to advanced corrosion.
Before offshore construction of pipelines, power lines or wind farms, munition detection surveys are carried out with large magnetometer platforms, towed 2-3 m above the seafloor and able to detect objects starting at 100 kg. Risks imposed by smaller ammunition are accepted due to lack of alternatives.
There is no systematic probing in inland waters. Local manual surveys with smaller probe arrays (e.g., at construction sites) can also detect only large-caliber objects, since due to inaccurate level maintenance the distance to the bottom is large.
Solution
Magnetic-free propulsion drives, special electronics and shielding push the AGD electric and magnetic emissions under the ambient noise levels, whilst its bionic underwater positioning system allows to maintain centimeter-accurate 3D navigation close to the seafloor.
Mobile Underwater Sonar Technology
MUST - aims at conceiving, designing, and engineering an intelligent, manageable, distributed and reconfigurable underwater acoustic array that could drastically improve the efficacy of the methodologies used to perform geophysical and geotechnical acoustic surveys at sea.
Recent research have demonstrated that there is potential for groups of robots collaborating for ocean exploration and exploitation. Traditionally, these tasks are performed by experts from a surface vessel. The idea driving this proposal is that of developing advanced cooperative and networked control / navigation systems to enable control of many marine robots (both on the surface and submerged) to interact by sharing information as a coordinated team.
The project brings together a group of research institutions, surveying companies and SMEs with a proven track record in autonomous adaptive and robust systems, communications, networked cooperative control and navigation, and marine robot design and fabrication.
Expertise on the quality of its consultancy work
Architectural acoustics
Building physics
Flow technology
Noise control
Vibrations control
Data-driven physics & ail
Working conditions
Underwater acoustics